Programme | 5-6 may 2026
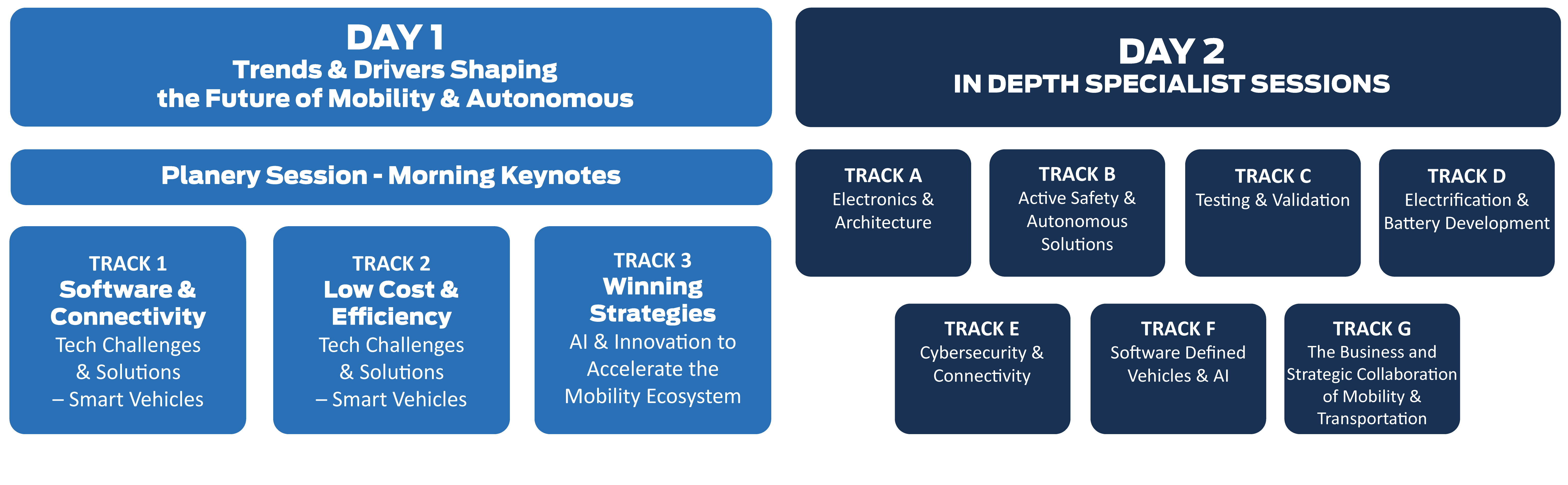
DAY 1
Trends and Drivers Shaping the Future of Mobility
PLANERY SESSION – MORNING KEYNOTES
Venue: Congresshall
08:30 Morning coffee and exhibition visit
09:00 Moderator’s Introduction
Dr. Sigma Dolins, Industrial PhD and Researcher in Mobility Transformation, RISE Research Institutes of Sweden
Hans Arby, Senior Researcher, Member of Gothenburg City Council, Senior Adviser Arthur. D.Little, RISE
09:10 Strategic Presentation: Overview of the SDV Landscape and Roadmap for 2026 and Beyond
Augustin Friedel, Associated Partner, MHP a Porsche Company, Germany
09:40 Deep Diving in SPA3: Volvo Cars Superset Tech Stack for Hardware and Software for Future Products
Alwin Bakkenes, Head of Software Engineering, Volvo Cars
10:10 Discover the Future of AI-Defined Mobility
Norm Marks, Vice President Automative Enterprise, NVIDIA, U.S.A
10:40 Networking break and exhibition visit
ENABLING SMART VEHICLES WITH SOFTWARE & CONNECTIVITY
Venue: Congresshall
11:20 Moderators’ Introduction
Augustin Friedel, Associated Partner, MHP a Porsche Company, Germany
11:30 The Crisis in Automotive Software Architecting and the Way Out
- Current crisis in automotive software architectures, with a focus on the European context: The main factors that have led to this crisis and why they persist
- Proven strategies, drawn from practice, that can help the industry overcome these difficulties
Vard Antinyan, Technology and Strategy Leader, Volvo Group
12:00 Networking lunch break and exhibition visit
13:30 The Software-Defined Vehicles Paradigm is Shifting Gears in the Commercial Vehicles Industry:
- What can we learn from the introduction of the iPhone in 2007?
- The new technology stack drives a shift in how and who creates value
- Define the boundary conditions and then let developers develop
- Global data for global improvement – we are part of something bigger
Dr. Mathias Larsson Carlander, Strategy Officer, EE Areas Strategy & Change, TRATON Group R&D
14:10 Accelerate Product Development with Software and Hardware Model Pipelines
- Build a “model factory” mindset that speeds up innovation
- Share and deploy models effortlessly with the right backbone
- Bring software and system modeling closer than ever – without the pain
Wensi Jin, Global Manager Automotive, MathWorks, U.S.A
Lars Rosqvist, Engineering Manager Automotive, MathWorks
14:40 Paving the Digital Highways of the Software-Defined Vehicle with E2B and GMSL
- The ideal SDV network
- Flexibility, unification, and the shift toward centralized software
- Classes of in-vehicle connectivity technologies
- Technology convergence and how E2B + GMSL accelerate SDV architectures
Niall O’Connell, Senior Principal Engineer – Automotive, Analog Devices, Ireland
15:00 Beyond Warranties and Recalls: Detecting Quality Issues Pre-Claims
- From Reactive to Proactive: Shifts the focus from lagging warranty claims to an AI-driven approach that detects emerging quality issues long before they become formal complaints
- Digital Twins and Agentic AI: Utilizes real-time “digital twins” and specialized ML models coupled with the latest AI Quality agents to interact with home grown existing platforms and newly breaded AI agents
- Quality-in-the-Loop: Introduces a new paradigm where real-time field data is fed directly back into R&D and production, making quality a continuous input for engineering improvements
- Strategic Benefits: Protects safety and customer satisfaction while reducing the costs associated with recalls and warranties, turning field data into a long-term strategic asset
Arnon Shafir, VP, Automotive Data Intelligence, Upstream Security
15:20 Networking break and exhibition visit
16:00 Hardware Roots, Software Wings: Harmonizing Dual Mindsets in the Evolving Automotive Industry
Anya Ernest, People Manager, Polestar Connected Services & President of the Board, Women in Tech Gothenburg
Alexandra Kloß, Technical Product Owner Instrument Cluster, BMW Group, Germany
16:30 From Static Twins to Agentic Simulation: Turning Weeks into Minutes in Automotive Operations
- Why the old way breaks: Factories change fast; one off simulations go stale. Agentic sims use live data to keep decisions current.
- What it’s made of: Software agents, many LLM, a digital twin, and event streams that plug into your existing systems. All versions and testable like code.
- Smart and safe: AI suggests, experts approve. Guardrails, audit logs, and repeatable results built in.
- Weeks to minutes: Auto generate and rank scenarios for routing, staffing, and changeovers—more throughput and steadier takt.
- Real world case: Safety critical, high mix line – rollout steps, what worked, what didn’t. Less slideware, more software.
Fredrik Magnusson, Head of Product and Services, Epicz lab
17:00 Moderator’s closing remarks
17:10 Networking Mingle
ENABLING SMART VEHICLES WITH LOW COST & EFFICIENCY
Venue: E4
11:20 Moderators’ Introduction
Dr. Ingo Stürmer, CTO & Head of Technology, Volvo Autonomous Solutions
11:30 From Pilot to Production: Scaling Autonomy to Industrial Reality – What It Actually Takes
- Which industry segments are leading the path to commercial autonomous transport – and what this means for the broader industry
- The convergence of autonomy, electrification, and mixed-traffic operation as a single integrated platform challenge
- The structural and organizational barriers that prevent scaling – and why they are harder to solve than the technology itself
- Moving from fleet-of-one to repeatable, multi-customer deployment: lessons from real operations
Dr. Ingo Stürmer, CTO & Head of Technology, Volvo Autonomous Solutions
12:00 Networking lunch break and exhibition visit
13:30 Test automation Is So Much More Than Test Cases
- As software systems increase in both size and complexity, adding more test cases is not the solution
- Prevent your CI/CD pipeline from becoming a bottleneck as the cost of automated testing increases over time
- Insights from six large-scale companies on what works – and what doesn’t – in real industrial settings
- Actionable strategies for automated testing of units and components in large software systems
Dr. Torvald Mårtensson, Technical Fellow within System Integration Testing, Saab Aeronautics & Associate Professor of Software Engineering, Linköping University
14:00 The Automotive Industry’s Shift Toward Centralized E/E Architectures
- Consolidates dozens of ECUs, creating a massive migration challenge for OEMs as software must move across system boundaries
- This effort is compounded by the reliance on legacy code bases that suffer from inadequate documentation and a critical dependence on a limited pool of Subject Matter Experts (SMEs)
- Comprehensive services to modernize these legacy systems using GenAI for migration to new technologies, and adapting development processes to seamlessly integrate newer frameworks
- CodeConcise which provides a hierarchical breakdown and pre-analysis of the code base, ready to provide the specific context for answering questions, specifically tuned to an organisational approach / implicit knowhow
Vivek Poovalingam, Solutions Architect, Thoughtworks
Harald Walter, Principal Consultant and Developer, Thoughtworks
14:30 Networking break and exhibition visit
15:10 Testing Automated Vehicles: Infrastructure-Driven Insights from the Frontline
- How test infrastructures shape the development and validation of automated driving systems
- Challenges in replicating real-world complexity in controlled environments
- The role of scenario-based testing and safety assurance
- Lessons learned from operating a full-scale test facility for connected and automated mobility
Fredrik Åkeson, CPO, AstaZero
Håkan Andersson, Director, Testing, AstaZero
Panel Discussion
16:00 Shaping the Future of Mobility – From Software‑Enabled Powertrains to Software‑Defined Trucks
- The industry is moving from hardware centric engineering to software orchestrated vehicles – what does that really means in practice?
- The transformation of the powertrain as a software enabled asset and the journey towards a Software Defined Truck platform
- Various challenges – starting from SDV concepts until leveraging AI at scale
Panelists:
Maverson Rosa, Enterprise Architecture & Tech – Digital Engineering, Volvo Group Digital Technology & Operations
Henrik Eigert, CIO, Aurobay
Deodatt Bawachkar, Head of Digital Design Practice, ERS, Europe, HCLTech
16:20 Code Rot at Machine Speed: Preventing AI-Induced Technical Debt in Automotive Software
- AI Guardrails in Practice: How to integrate automated reviews and IDE-based safeguards to maintain human-readable code
- Understanding vs. Speed: Why fast code generation must be balanced with long-term maintainability, especially in regulated environments
- Empirical Insights from Automotive Projects: Lessons learned from industry-academic collaborations on AI engineering and software quality
Markus Borg, Senior Lecturer at Lund University and Principal Researcher, CodeScene
17:00 Moderator’s closing remarks
17:10 Networking Mingle
AUTOMOTIVE SECTOR MEETING A DISRUPTIVE LANDSCAPE
Venue: E1+E2+E3
11:20 Moderators’ Introduction
Dr. Sigma Dolins, Industrial PhD and Researcher in Mobility Transformation, RISE Mobility and Systems
11:30 Developing Physical AI: With a Little Help from Our Friends – How collaboration with start-ups and universities accelerates innovation
Erik Coelingh, CTO, Zenseact
12:00 Networking lunch break and exhibition visit
13:30 QuantumNorthzone: A Nordic Collaboration and Industry Quantum Powerhouse to Strengthen our Industrial and Regional Competitiveness, Today and Tomorrow!
- Materials Development – new composites and lightweight materials for vehicles, energy, and aerospace
- Supply Chains – robust planning through quantum optimization, even under global disruptions
- Energy Optimization – more efficient batteries, smarter grids, and greener production chain
Mikael Rönnholm, Director Emerging Technologies, Volvo Group
14:10 Digital Engineering: Virtual, Connected, Accelerated
- Accelerating product complexity
- Role of digital engineering
- Open model-based systems engineering (MBSE) framework
- Benefits of early holistic design
Dr. Olaf Kath, VP Product, Synopsys, Germany
14:40 Eclipse S-CORE – How OSS is driving Open Innovation in Automotive
- The motivation behind S-CORE, highlighting its potential to accelerate scalable software amongst rising complexity in automotive systems due to electrification and autonomy
- Providing insight into how Open-source software, modular architectures and AI are key in mastering future challenges
- How S-CORE can enable OEMs, suppliers and tool vendors to adopt new ways of collaboration and novel business models, leading to faster innovation cycles and smarter workflows
Markus Menze, Global Sales Manager S-CORE, Etas
15:00 Networking break and exhibition visit
15:40 Accelerating SDV through AI and Strategic Collaboration
- Setting-up a unified architecture
- Upgrading software and hardware in a multidiscipline engineering view
- Delivering next-gen user experience
Julio Leyva, T&M Industry Solution Experience Senior Manager, Dassault Systèmes, France
16:00 The Frontier of Autonomous Driving – A Global Perspective
- Kognic is serving OEM, T1, and Stack Providers across all major markets: the US, Europe, China, and Japan
- In this talk, Daniel will share insights from what leading AD/ADAS teams are focused on, how maturity varies across markets, and how that is related to customer expectations
- This includes end-to-end methods (E2E), visual language action models (VLAs), online reasoning in cars, and other exciting new technologies
Daniel Langkilde, Co-founder & CEO, Kognic
16:30 The Future of Mobility – Whether It’s on the Road or in the Air
Sven De Smet, Head of Brand & Marketing, XPENG Europe
17:00 Moderator’s closing remarks
17:10 Networking Mingle
DAY 2
In Depth Specialist Sessions
A NEW ARCHITECTURE FOR THE SOFTWARE DEFINED VEHICLE
Venue: E4
08:30 Morning coffee and exhibition visit
09:00 Moderator’s Introduction
Miroslaw Staron, Professor, Chalmers University of Technology & University of Gothenburg
09:10 Synching for the Future: How the SDV Investment Can Be Turned from a Cost Save to a Revenue Stream by Enabling a New Service Ecosystem
- Integrating new services take too much time due to complex dependencies and many required changes through the platform layers
- WirelessCar are developing an Open SDV Platform bridging onboard and offboard to speed up development
- How to integrate a new service through the Open SDV Platform
- How the Open SDV Platform integrates with onboard environments
Johan Thelin, Product Manager, WirelessCar
09:50 Vehicle Innovation at a Crossroad: Aligning SDV Vision with E/E Architectural Reality
- Hardware Viewpoint: How different software dependent SDV layers get impacted by abstract hardware complexities
- Software Viewpoint: The shift toward SDVs demands a transformation of E/E architectures—integrating high-performance computing, virtualization, and real-time connectivity to deliver scalable and safe vehicle platforms. The impact of centralized and zonal architectures on SDV realization
- Business Viewpoint: Cost and production benefits of zonal architecture versus legacy distributed E/E designs
- Data/AI Viewpoint: Lessons from data center networking and computing applied to automotive architectures
Esha Tandon, Configuration & Platform Architect, Polestar
10:25 SDV and Relevant Architectural Changes
- Where is the industry today in terms of SDV levels?
- The changes needed in the existing architectures to enable higher SDV levels
- What do those changes mean for the future software development ecosystem?
Vivek Sannabhadti, Senior Expert, Elektrobit, Germany
10:50 Networking break and exhibition visit
Panel Discussion
11:30 Vehicle Innovation at a Crossroads: SDV and Architectural Changes
Moderator:
Miroslaw Staron, Professor, Chalmers University of Technology & University of Gothenburg
Panelists:
Satish Premanathan, Vice President, Semiconductor Practice, ERS, HCLTech
Mattias Nyberg, Research manager for Systems Engineering and SW, TRATON & part-time Researcher and Supervisor, KTH Royal Institute of Technology
Martin Hiller, Solution Architect – Software & Electronics Platform, Volvo Cars
Sudhakar Molleti, Vice President SDV, Tata Technologies
12:00 Democratizing Automotive Software
- Automotive software teams lose valuable time waiting for hardware, cross-team dependencies, and environment setup instead of building
- Virtual-first development and infrastructure as code streamline workflows and reduce these bottlenecks
- Agentic AI further accelerates development, demonstrated through live examples and real customer results
Per Sigurdson, CEO & Co-Founder, RemotiveLabs
12:30 Networking lunch break and exhibition visit
13:40 API-centric Development for Automotive Applications on HPCs
- Decouple application development from execution platform by managed APIs
- Get to know a technical approach how to use and implement managed APIs in a vehicle HPC
- Pros and cons of API-centric development
Andreas Raisch, Senior Director Software Development, Vector Informatik GmbH, Germany
14:00 The Development of Next Generation SW&EE-platform for EX60
Martin Hiller, Solution Architect – Software & Electronics Platform, Volvo Cars
14:40 Turning Software-Defined Commercial Vehicles into Reality
- How Software-Defined Commercial Vehicles (SDCV) are driven by fleet and OEM needs – focusing on uptime, TCO optimization, scalable computing and continuous software-driven value creation
- Bosch as SDCV enabler and ecosystem partner – providing a framework that combines software, compute platforms, lifecycle services, and co-innovation partnerships
Andreas Feldges, Head of Engineering Commercial Vehicle, Robert Bosch GmbH, Germany
15:00 Networking break and exhibition visit
15:30 Service-Based Systems Engineering for Software-Defined Vehicles
- SDVs shift automotive development from system-centric to service-centric architectures
- Vehicle components can be viewed as providing and consuming services within a flat service ecosystem
- Service-based systems engineering enables horizontal traceability instead of traditional vertical system decomposition
- Open service ecosystems require unambiguous specifications to ensure correct integrations
- Formal contracts can provide such specifications to decouple service provider implementations from their consumers
Mattias Nyberg, Research manager for Systems engineering and SW, TRATON & part-time researcher and supervisor, KTH Royal Institute of Technology
16:00 Meet Sweden’s First Prompt-SM Champion and Develop Yourself in Prompting
Magnus Gille shares his expertise in prompting and reveals the strategies behind his winning entries in Sweden’s first Prompt-SM. Develop your way of writing prompts in ChatGPT and other AI assistants that you can use in your everyday life or at work.
- Learn the basics of practical prompting
- How to get AI to deliver answers that are perfectly tailored to your specific needs
Magnus Gille, Engineer and Sweden’s first AI prompting champion with over 17 years of experience from Ericsson and Scania
16:40 Moderator’s closing remarks and close of conference
LAYING THE ROAD FOR SAFE AUTONOMOUS VEHICLES
Venue: H2
08:30 Morning coffee and exhibition visit
09:00 Moderator’s Introduction
Dr. Håkan Sivencrona, Senior Technical Leader – Safety, Volvo Cars
09:05 Autonomous Transportation Solutions: Development and testing on Road
Peter Thorngren, Fellow Technology and Strategy Leader, Volvo Group
09:35 Accelerating DevSafeOps for Autonomous Driving through Generative AI: Silver Bullet or Just Buzz?
- DevSafeOps combines DevOps speed with the rigor of safety-critical development, made feasible by technologies like centralized compute and over-the-air updates in intelligent vehicles
- Safety development processes are inherently complex and slow, especially within the autonomous driving domain due to system and environmental complexity
- The talk explores how Generative AI (e.g., LLMs) can support or automate parts of the safety lifecycle, including hazard analysis (HARA), code generation, and test case creation
- Synthetic data generation, including 3D Gaussian splatting, is discussed as a potential enabler for ML Ops within DevSafeOps, helping to scale data-driven safety validation
Ali Nouri, AI and AD Researcher, Volvo Cars & Chalmers University of Technology
10:05 Use of Chiplets for Scalable Automotive Compute Applications
- Automotive compute demands are rapidly increasing, and monolithic SoCs can no longer scale efficiently in performance, thermals, or manufacturability.
- Chiplets enable modular, heterogeneous integration, combining the best process nodes for logic, memory, analog, RF, and power into a single high performance package.
- Cost, yield, and lifecycle advantages make chiplets ideal for automotive: improved yields, 20-40% cost reduction, and flexibility to refresh digital compute while keeping long lived analog and safety components stable.
- Chiplets support the shift to Software Defined Vehicles, providing the scalable, centralized compute foundation required for ADAS, autonomy, next gen infotainment, and secure connectivity.
Stewart Bell, Director Networking Sales and Solution SoC Marketing, Socionext Europe
10:30 Networking break and exhibition visit
Panel Discussion
11:10 How to Lay the Road for Safe Autonomous Vehicles
Moderator:
Dr. Håkan Sivencrona, Senior Technical Leader – Safety, Volvo Cars
Panelists:
Peter Thorngren, Fellow Technology and Strategy Leader, Volvo Group
Ali Nouri, AI and AD Researcher, Volvo Cars & Chalmers University of Technology
Kavya Pandey, Functional Safety Manager, Polestar
11:40 A High-Frequency Floquet Stability Index for Vehicle Control via Rear-Wheel Steer-by-Wire
- During vehicle motion, a stability index is found with a frequency over 20 Hz, using Floquet theory
- This index provides a real-time measure of the driver’s proximity to a loss of control of the vehicle
- The stability index should be used to actuate a smart rear-wheel steer-by-wire actuator
- Focus on rear-wheel steering as an effective method to enhance active safety beyond traditional ESP interventions, improving responsiveness, smoothness and driver acceptance
Matteo Fontana, Handling and Braking Performance Engineer, Iveco Group, Italy
12:20 Networking lunch break and exhibition visit
13:30 Federated Self-Supervised Learning for Vehicle Perception
- Federated Self-supervised Learning (FSSL) addresses data transfer and labeling issues in vehicle perception
- Modern vehicles generate vast image data, which is challenging to transfer and label centrally
- FSSL trains models locally and uses self-supervised learning to avoid human annotations
Mina Alibeigi, AI Researcher Lead, Zenseact
Jonas Frankemölle, Machine Learning Engineer, Scaleout Systems
13:50 AD trucking in China – Domestic focus or European Concern
- Global AD/ADAS status in trucks, with a clear China vs. Europe comparison
- Domestic focus or international play: maturity, cost, scalability, and implications for EU OEMs. How to compete
- Implications: L2–L4 synergies, data strategy, and geo resilient AD stacks to stay competitive
Patrick Eisele, Senior Consultant SDV & Autonomous Mobility, P3
14:10 Challenges in Connected & Cooperative Automation – Safety, Security and Trustworthy V2X
Ashok Krishna, Senior Product System Architect, SDV, Volvo Cars
14:40 Networking break and exhibition visit
15:10 What Can Safety in Automotive Learn from Safety Investigations of Air Incident and Air Accident?
Agne Widholm, Senior Investigator, BVR Academy
15:50 The Constant Flow of Ever-increasing Challenges for the Dedicated Safety Manager
Dr. Håkan Sivencrona, Senior Technical Leader – Safety, Volvo Cars
16:30 Moderator’s closing remarks and close of conference
DEVELOPING TESTING METHODS IN COMPLEX AUTOMOTIVE SYSTEMS
Venue: H1
08:30 Morning coffee and exhibition visit
09:00 Moderator’s Introduction
Peter Janevik, CEO, AstaZero
09:10 ATOS: Automating Trust in AI-Driven Vehicle Validation
- ATOS: An open-source platform unifying simulation and physical proving ground testing for automated and AI-driven vehicles
- Seamless orchestration of complex scenarios using standardized interfaces (ROS 2, OpenSCENARIO, ISO/TS 22133:2023)
- High repeatability and reliability demonstrated through EuroNCAP and multi-actor test scenarios
- Temporal and spatiotemporal analysis showing millisecond-level precision and centimeter-level consistency
- Future-ready validation tool enabling safer, more efficient, and interoperable vehicle testing
Victor Jarlow, Research Leader, AstaZero
09:45 Transformation of Integration and Testing towards a Software-Defined Vehicle Culture
- How integration & testing must evolve to deliver quality faster in an SDV context
- How to shift-left and make continuous testing a natural part of the development flow
- How TRATON enables CI/CD on higher levels of testing
- What is needed by autonomous development teams with End-To-End ownership?
- Where do you start and what is the impact on processes, toolchain and how we organize ourselves? – Cases from TRATON
Mikael Adenmark, Senior Technical Advisor and Flow Initiative Owner, TRATON Group
10:15 Elevating Product Quality at China Speed with Shift-Left Validation
- The Challenge: 2-year SOP cycles demand speed—traditional validation can’t keep up
- The Breakthrough: Shift-Left Validation starts testing from Day 1 with massive test libraries and automation
- The Payoff: Slash costs by up to 50%, boost productivity 40%, and hit quality targets faster
Dr. Manaswini Rath, Senior Vice President Software Defined Vehicles SDV, Autonomous Driving, Chassis Engineering, KPIT
10:40 Networking break and exhibition visit
Panel Discussion
11:20 Validation at Scale: Bridging Virtual and Physical Testing for Next-Generation Vehicles
- Hybrid Validation Strategies: Combining simulation, HIL/SIL, and proving ground testing for robust results
- Scenario Explosion Management: How to handle millions of test cases for ADAS and autonomous systems
- Regulatory Compliance & AI Transparency: Meeting UNECE, ISO 26262, and AI Act requirements in validation workflows
- Infrastructure & Ecosystem Collaboration: The role of test facilities and cloud-based platforms in scaling validation
Moderator:
Peter Janevik, CEO, AstaZero
Panelists:
Daniel Poveda, Research Engineer, Chalmers REVERE Lab
Felix Andlauer, Senior Project Manager, AstaZero
Jacob Aduama, Head of ATS Validation, Volvo Autonomous Solutions
Sabina Edenlund, Technical leader – Test Driven Development, Volvo Cars
11:50 Beyond the POC: The Uncomfortable Engineering of Turning Ideas into Industrial Reality
- POC ≠ Progress: The importance of having a plan, and how to do the right POC to avoid false confidence
- The Limits of Simulation – and Why Simulation Is Everything: All simulations are not created equal
- Context Is King: How technology maturity, business constraints and user reality must shape what and how you communicate
- Letting Go to Move Forward: Concept survivability, prioritization and the importance of stopping the wrong paths to enable the right ones
Dr. Annika Larsson, Strategy and Operational Excellence Manager, Volvo Group
12:30 Networking lunch break and exhibition visit
13:30 Efficient XIL Test & Verification
- XIL the combination of MIL, SIL & HIL
- SIL scales in several dimensions, pros and cons of different Virtual ECU levels
- Reusing Simulation Models & other test framework artefacts
Per Olsson, Senior Expert Vehicle Dynamics Virtual Verification, Volvo Group
14:10 Emerging AI Trends and Methodologies in Automotive Software Testing
- Shared challenges in automotive SW testing and emerging AI trends
- Human-in the-loop methodology
- Higher velocity without losing ASPICE discipline
- Practical applications examples
Alexandra Khrenova, Key Account Director, Intellias
Volodymyr Mandzyuk, Intellias
14:30 Scaling Test & Validation by Design: How direct ownership improves efficiency, quality and decision‑making
- Organizational Structure as a Key Enabler for Ownership, Testing Efficiency, and Customer Satisfaction
- Understanding Scalability in Test and Validation for managing increasing System and Organizational Complexity: Scalability is not about doing more — it is about growth without loss of control.
- Closing the Loop Between Requirements Definition, Test Strategy and Validation Results. Designing requirements and testing together closes the gap between intent and output
- Improving Overall Product Quality Through Validation‑Driven Decisions and Continuous Feedback Loops. When validation continuously feeds decisions, quality becomes predictable and sustainable.
Bartolomeo Bocchino, Head of Electric & Electronics, Italdesign
Tommaso Junior Costa, Infotainment Testing Domain Leader, Italdesign
14:50 Shift Left to Deliver Right, Reinventing V&V for SDV
- How a shift‑left V&V strategy can be embedded early in the SDV lifecycle using virtual validation and AI‑driven test automation
- Practical challenges in maintaining consistency and fidelity between virtual ECUs, simulation, and physical testing
- Lessons learned from implementing continuous verification frameworks to improve software release velocity without compromising safety
Krishnananda Shenoy, Vice President, Delivery Head, Next-Gen Mobility, Infosys Limited
Thomas Utzinger, Director, Verification & Validation, in-tech, an Infosys Company
15:10 Networking break and exhibition visit
15:30 Modelling and Simulation to Drive Development and Verification of Vehicle Motion and Energy Functionality
- How simulation is used to validate vehicle dynamics related safety and safety functions
- How simulation supports design decisions by varying design and operational parameters
- Example from projects
- Strategies for best combining simulation and real-world testing
- Reflections on what works well and what can be improved in our shared “ecosystem” for vehicle development
Bengt Jacobson, Professor and Group Leader Vehicle Dynamics, Chalmers University of Technology
16:05 The SDV feedback loop problem your Software Factory Can’t Outgrow
- From managing complexity – to eliminating it
- Why SDVs fragment engineering context faster than governance can capture it — and why scaling headcount makes it worse
- The difference between searching your data and surfacing the relevant context around an issue: PCM dependencies, fault patterns, and affected configurations across distributed teams
- Agentic Knowledge Management as the missing operating-model layer — AI agents that read across engineering toolchains, apply policies automatically, and write resolutions back into live workflows
- How OEMs are already making this shift, and why the competitive window to adopt it is narrowing
Johannes Foufas, Technical Manager Software Factory, Volvo Cars Corporation
Liam Boogar, CRO, Waypoint AI
16:40 Moderator’s closing remarks and close of conference
CHALLENGES, DEVELOPMENT AND IMPLEMENTATION OF EV TECHNOLOGIES
Venue: E2
08:30 Morning coffee and exhibition visit
09:00 Moderators’ introduction
Linda Olofsson, Director, Swedish Electromobility Centre
Anna Larsson, Director Electromobility at Mobility and Systems, DigitalSystems, RISE Research Institutes of Sweden
09:10 Battery Algorithms: Past, Present, Future
- Past: How early battery algorithms began with simple, rule-based logic focused on safety and basic charge control
- Present: Today’s advanced model-based and data-driven algorithms that power intelligent Battery Management Systems (BMS) for improved battery performance and lifespan
- Future: Emerging trends, where AI, digital twins, and predictive analytics will shape the next generation of smart, self-learning battery systems
Anna Fedorova, Senior Battery Algorithms Engineer, Iveco Group, Switzerland
09:50 Scaling V2G: Volvo Cars’ Market-Ready Solution
- From pilots to scalable reality: What it takes to move V2G from isolated demos to large-scale deployment, highlighting Volvo Cars’ approach to grid compliance, coordination with system operators, and certification of V2G-ready solutions
- Navigating technical and regional diversity: Comparison of V2G architectures, AC vs. DC, and how interoperability requirements, grid codes, and regional grid characteristics shape the choice of solution
- Standards and the road ahead: How evolving standards and regulatory frameworks will influence future V2G implementations, certification pathways, and the broader integration of vehicles into the energy system
Ali Fotouhi, Technical Expert in Vehicle-Grid Integration, Volvo Cars
10:30 Networking break and exhibition visit
Panel Discussion
11:00 Vehicle-to-Grid at Scale: Turning EV Fleets into Energy Assets
- Scaling V2G Beyond Pilots: What does it take to integrate V2G into mainstream EV ecosystems?
- Grid Stability and Energy Markets: How V2G can support renewable integration and flexibility services
- Regulatory and Standardization Challenges: Navigating interoperability, compliance, and policy frameworks
- Business Models and User Adoption: Incentives for OEMs, utilities, and consumers to embrace V2G
Moderators:
Linda Olofsson, Director, Swedish Electromobility Centre
Anna Larsson, Director Electromobility at Mobility and Systems, DigitalSystems, RISE Research Institutes of Sweden
Panelists:
Ali Fotouhi, Technical Expert in Vehicle-Grid Integration, Volvo Cars
Emanuella Wallin, Product Owner in the Charging and Energy team, Polestar
Therese Caesar, Flexibility Manager, Göteborg Energi Nät
Tor Krog, Head of Siemens eMobility Nordic & the Baltic Region, Siemens Smart Infrastructure, Norway
Marc Manns, Deputy Vice President and Senior Delivery Partner – ESS, Tata Technologies
11:40 What it Takes to Electrify Commercial Transport
- Why charging commercial vehicles requires a fundamentally different approach than passenger EV charging, driven by operational patterns, energy demand and uptime expectations in logistics
- The critical role of infrastructure readiness: grid capacity, site design, accessibility and reliability. And how an eMSP helps translate these needs into usable charging access
- How accurate data, POI classifications and unified data models enable smart routing, planning and operational optimization for heavy-duty fleets
- The importance of deep collaboration between eMSPs, CPOs and OEM brands to deliver seamless access, interoperability, stable pricing and a consistent customer experience across Europe
Petra Sundström, Managing Director, TRATON Charging Solutions
12:20 Networking lunch break and exhibition visit
13:30 Bridging Physical and Virtual ECU Testing: Implementing V-HiL for Enhanced Automotive Validation Workflows
- Virtual ECU Testing Innovation: Siemens Capital Embedded Virtualizer enables Virtual Hardware-in-the-Loop (V-HiL) testing with full hardware fidelity, allowing the same production binary to run in both virtual and physical environments without modifications
- Unified Testing Workflow: A single test suite can target either physical or virtual ECUs through test variants, eliminating duplicate test development while enabling automated, scalable testing in CI/CD pipelines
- Proven Results: The 2025 proof of concept demonstrated increased test throughput, reduced setup time, and improved regression automation while maintaining correlation with physical HiL testing, positioning V-HiL to handle the majority of routine ECU tests
Lance Brooks, Principal Engineer, Siemens, France
13:50 Battery Circularity: A Second-Life Perspective
- The Mission to a Sustainable Future
- Second-Life Battery Advantages
- Rebaba’s Value Proposition
- Vision for the Future
Ludvig Karlberg, CFO, Rebaba
14:30 Networking break and exhibition visit
15:00 Driving Performance in Heavy-Duty Electric Vehicles: Key Strategies and Real-World Successes
- What is driving performance?: Overview of factors influencing energy consumption in both Internal Combustion Engine (ICE) vehicles and Battery Electric Vehicles (BEV) trucks
- Importance of the right tool for the customer: The significance of correctly specifying the vehicle due to the vast variations compared to passenger cars
- Key to Profitability: Infinite range is not the ultimate goal. Charging, payload, and low consumption, coupled with the “right” amount of batteries, can ensure customer profitability
- Real world results: Volvo’s journey to significantly improve fuel efficiency, winning the Green Truck Award, and how this achievement is mirrored in electric trucks with a shared platform
Raman Yazdani Wetterberg, Feature Architect Energy Management, Volvo Group Trucks Technology & Industrial Division
15:40 Urban Fast Charging at Scale: Insights from the Audi charging hubs
- From pilot conditions to operational reality: Practical lessons from deploying high‑power fast‑charging in urban areas with limited grid capacity, including stationary energy storage, site modularity, utilisation patterns, local energy constraints and the role of data in supporting operational decisions.
- Planning and optimisation using simulation and operational data: How simulation tools, digital twins and measured usage data support site planning, load forecasting and infrastructure design what models capture well, and where real‑world behaviour differs.
- Operations, data‑driven insights and future considerations: What charging‑hub deployments reveal about interactions with city planning, grid operators and permitting processes; how customer behaviour and AI‑supported analysis of operational data and customer feedback help identify issues and improvement potential; and which technical, regulatory and organisational factors matter when scaling such solutions, including a brief outlook on energy flexibility and market integration where relevant.
Dr.-Ing. Francesco Montanari, Project Lead Software, Data & AI, Audi charging hubs
16:30 Moderators’ closing remarks and close of conference
DEALING WITH THE CRITICAL IMPORTANCE OF CYBERSECURITY IN CONNECTED VEHICLES
Venue: E1
08:30 Morning coffee and exhibition visit
09:00 Moderator’s Introduction
Dr. Ana Magazinius, Cybersecurity Manager, Micropower Group
09:10 Product Cybersecurity + Ecosystem Approach
- Why we need ecosystem approach in fragmented security landscape
- How to secure full Lifecycle from design up to Customers
- How to build the trust transparency and collaboration
- Cybersecurity as business enabler not cost center
Tomasz Werocy, Product Cybersecurity Compliance Officer, Volvo Buses
09:50 Real-Time Operating System Development: Aligning Safety and Security
- Focusing on threat assessment and mitigation for ISO/SAE 213434-compliant RTOS development
- Achieving functional determinism and ISO 26262-compliance by integrating security- and safety-concepts
- Safety-/security-by-design principles to guarantee certification readiness throughout the complete RTOS lifecycle
- Differentiate your business with superior security practices
Carmelo Loiacono, Field Applications Engineer, Green Hills Software, Italy
10:15 Navigating an Uncertain Threat Landscape: The Advent of AI and the New Reality of Global Affairs
- Growing Gap Between Attackers and Defenders: The distance between those who attack and those who defend is constantly increasing, driven by technical complexity and an increasingly uncertain global situation
- The rise of AI has accelerated the pace and sophistication of cyberattacks, making it harder to identify real threats amidst a constant noise of alarms
- To face the reality of AI-driven attacks, defense strategies must evolve at a faster rate than the threats themselves
- From Reaction to Proactivity: The conclusion is that organizations need to adapt to filter out the noise and focus on the most critical and actual threats in a changing world
Jacob Henricson, CEO, Nørdsnipe & Advisor, Cybercampus Sweden KTH
10:50 Networking break and exhibition visit
Panel Discussion
11:30 Automotive Cybersecurity & AI
Moderator:
Dr. Ana Magazinius, Cybersecurity Manager, Micropower Group
Panelists:
Steven Van Acker, Cybersecurity Researcher and Penetration Tester, OverTheWire.org, VantaSec AB
Heidi Norman, Founder, Cybersecurity Expert and AI Act Explorer, AIRENE
Kristina Knaving, Senior Researcher and Advisor, AI Governance, Ethics and Risk, Literate Design
Martin Böhner, Cyber Sec Expert, Cognizant Mobility
12:00 AI Trends Through the Lens of Safety Engineering and Cybersecurity
Based on direct industry observations, this session examines rapidly evolving AI trends from safety and cybersecurity perspectives.
- Trending observations from global conferences and safety-security leaders
- AI accelerated product development and altered engineering workflows
- AI-enabled products challenge traditional validation and cyber threat paradigms
- Emerging safety, cybersecurity, and governance risks and trade-offs
- Current maturity and trajectory from safety and cybersecurity perspectives
Sofie Weidenlöv, Manager for Safety and Cyber Security Risks, Volvo Penta
12:40 Networking lunch break and exhibition visit
13:50 Redefining Risk: From Exposure to Intelligence-Driven Automotive Cybersecurity
- Shift in risk: Why the SDV era reshapes the threat landscape
- Prioritized insight: How predictive analytics helps identify which exposures truly matter
- Clarity and context: How threat intelligence simplifies and sharpens decision-making
- Path forward: Why the industry needs both visibility and foresight in forging a more proactive cybersecurity posture
Gregor Knappik, Senior Cybersecurity Solutions Architect, VicOne
Anders Hallgren, VP of Product Management, SystemWeaver
14:10 Mobility Cyber Risk Has Moved: From the Vehicle to the System That Operates It
- A new starting point: Cyber attacks increasingly originate in the cloud backend and within trusted system interactions
- A broader risk model: Cyber risk now spans access, system logic, and real-world behavior
- A new operating speed: Attackers leverage automation and identity at machine speed
- A new cybersecurity mission: Cybersecurity evolves from protection toward real-time governance of system behavior
Giuseppe Serio, VP of Market Development, Upstream Security
14:30 Networking break and exhibition visit
15:00 Where Automotive Cyber Security Meets Machine Learning
- The potential of AI to augment the cyber security measures
- The challenges of Engineering AI-driven cyber security systems
- How ML extends the capability of intrusion detection
- An industry-experience demonstration of ML-driven IDS
Mahshid Helali Moghadam, Senior Data Scientist, Researcher, TRATON
15:40 Cybersecurity in Automotive: Demystifying the Shady World of Cybersecurity and Hackers
- Demystifying the Shady World of Cybersecurity and Hackers
- Using real life examples, Auke will introduce the audience to the inner workings of hacking groups
- He will show you how they pick their targets and what you can likely expect from them in cybercrimes targeting the Automotive sector
- How can you prepare and be proactive to prevent upcoming hacker attacks?
- Let’s dive into the secretive and dark world of real hackers!
Auke Zwaan, Founder, Cybersecurity Specialist and former Hacker, Black Swan Cyber Defense, the Netherlands
16:30 Moderator’s closing remarks and close of conference
HOW TO CREATE SPEED IN SOFTWARE DEVELOPMENT?
Venue: Congresshall
08:30 Morning coffee and exhibition visit
09:00 Moderators’ Introduction
Martin Törngren, Professor in Embedded Control Systems, KTH Royal Institute of Technology
Jonn Lantz, Technical Leader in Agile Software Development, Volvo Group
09:10 Trustworthy DevOps and Digitalization for Complex Automotive Systems
- The AI paradigm shift for Software-Driven Vehicles
- Trustworthy DevOps in an Automotive Context
- Collaboration Across Domains and Disciplines
- Managing Complexity in Cyber-Physical Systems
Martin Törngren, Professor in Embedded Control Systems, KTH Royal Institute of Technology
09:45 From Hardware to Code: Overcoming the Challenges in Software-Defined Vehicle Platforms
Uwe Klaus Brandenburg, Chief Technology Officer & Senior Vice President Automotive and Manufacturing, DXC Technology, Germany
10:10 Software-Defined Vehicles: Turning Vision into Reality
- From Hardware to Software: How SDV is reshaping the automotive industry and enabling new business models. Volvo’s transition to centralized computing platforms for next-gen electric vehicles
- Building Scalable Platforms: Volvo’s SDV platform integrating infotainment, connectivity, and autonomous driving functions into a unified software stack
- Example: Volvo’s subscription-based features and parameterized software offerings (e.g., performance upgrades, connected services)
Martin Kristensson, Head of Software Defined Vehicle, Volvo Cars
10:50 Networking break and exhibition visit
Panel Discussion
11:30 AI-Defined Vehicles: From Intelligent Nodes to Ecosystem Game-Changers
- What does “AI-defined” mean for vehicles? How does AI transform the vehicle from a product into an intelligent node within a broader digital ecosystem?
- Technical perspective: The role of advanced AI agents in enabling autonomous decision-making and collective optimization
- Business and market dynamics: Will AI integration reshape traditional market structures, especially in fragmented regions like Europe? How will it impact OEMs, suppliers, and transport operators?
- Ecosystem collaboration: How do AI-driven vehicles interact with other smart systems and stakeholders in mobility networks?
- Future capabilities: What can we realistically expect in terms of AI functionalities today, in one year, and beyond?
Moderator:
Anton Wieselblad, Head of Data streaming and AI within the Section for Autonomous Intelligent Control Platform, Scania, former Start-up Ecosystem Manager, Scania Innovation Centre China
Panelists:
Mingke Luo, Founder, MASONS.AI
Jan Bosch, Professor of Software Engineering, Director Software Center, Chalmers University of Technology, Professor of AI Engineering, Eindhoven University of Technology
Simon Edström, Product Owner RnD AI Enablement, TRATON Group
Nathan Bulkley, AI Capability Lead and SDV Architect, Coretura
12:00 Scaling Connected Mobility: Overcoming Deployment Barriers in Connected Vehicle Ecosystems
- Deployment Realities: Why connected services often stall despite technical readiness and how to overcome those barriers with middleware
- Cost-Efficient Scaling: Strategies for deploying connected vehicles in constrained environments
- Resilient Software Infrastructure: How FleetMQ enables resilient connectivity without relying on full-scale rollouts of new wireless technologies
- From Problem to Solution: A concrete example of how software architecture and design can unlock the potential of connected mobility
Dr. Frank J. Jiang, CEO & Co-Founder, FleetMQ
12:30 Networking lunch break and exhibition visit
13:40 Transforming Real-Time Data Exchange for Software-Defined Vehicles with DDS and TSN
- How the convergence of Data Distribution Service (DDS) and Time-Sensitive Networking (TSN) addresses the need for flexible, low-latency, and predictable real-time data exchange in next-generation SDVs
- Illustrate how the integration of DDS’s data-centric middleware with TSN’s guaranteed bandwidth and bounded-latency networking creates a dynamic framework for rapidly deploying complex automotive features
- Through examples, show how to map DDS messages to TSN frames and configure TSN to meet crucial DDS-level Quality of Service (QoS) requirements in order to enhance the performance and scalability of in-vehicle data communication
- The technical guidelines and configuration models for deploying DDS over TSN based on the OMG DDS-TSN specification
Fernando Garcia, Principal Software Engineer, RTI, Spain
14:00 Regulations in Digitized Vehicles, Friends or Foes?
- Overview on related legislation efforts: Navigating the digital policies, how AI Act, Data Act, Cyber Resilience Act, UN ECE R155 interrelate in future cars
- Role of VDA for harmonization and aligning the industry in respective rule making
- Geopolitical Challenges
Dr. Kirsten Matheus, Expert Data, Digitalization & Artificial Intelligence, VDA German Association of the Automotive Industry, Germany
14:40 Navigation Toward Software-Driven Mobility: Embracing the Revolution by Leveraging AI, Data, and End-to-End Development
- Strategies for balancing the critical trade-offs between time-to-market, cost, and customer experience in the era of SDV
- Insights on leveraging Service-Oriented Architectures (SoA) to build agile, AI-powered features
- Key aspects for integrating AI from early development to continuous lifecycle improvement
- A clear understanding of how Bosch Engineering acts as a key partner for accelerated, end-to-end implementation of software-defined vehicle solutions – in early phases until series development
Christoph Müller, System Architect Software Defined Vehicle, Bosch Engineering, Germany
15:00 Networking break and exhibition visit
15:30 Accelerating SDV Through Strategic Software Partnerships
- How strategic software partnerships accelerate the OEM shift toward software-defined vehicles and strengthen ecosystem capabilities
- Insights gained from collaborating with a modern software company to enhance speed, scalability, and quality in SDV development
- How TRATON leverages value-driven partnerships to position itself as a leader in the SDV transformation
Abhishek Michael, Partnership Manager, TRATON
Georg Pinkert, Engineer, Applied Intuition
16:00 Beyond Agile: Building the AI-First R&D Organization for SDVs
- The “AI Supercharger” Concept: Moving from large Agile teams to human orchestrators managing AI agents
- Zero-Based Thinking in Auto: If we built a car company today with AI agents as the primary workforce, how would we handle safety cases and validation?
- The Hard Truth: Why overlaying AI on top of current automotive processes will fail to close the speed gap with tech-native competitors
Jan Bosch, Professor of Software Engineering, Director Software Center, Chalmers University of Technology, Professor of AI Engineering, Eindhoven University of Technology
16:40 Moderators’ closing remarks and close of conference
FINDING VIABLE BUSINESS MODELS AND REVENUE STREAMS IN THE NEW TRANSPORTATION ECOSYSTEM
Venue: E3
08:30 Morning coffee and exhibition visit
09:00 Moderator’s Introduction
Hans Arby, Senior Researcher, RISE Research Institutes of Sweden, 1st vice chair, Transport Board, City of Gothenburg, Senior Adviser, Arthur D. Little
09:10 Insights from the Fleet & Mobility Barometer 2026
- This is one of the largest annual Fleet & Mobility surveys performed globally and covers 28 countries around the world with a focus on Europe
- Companies are now developing charging strategies and exploring cost-effective financing methods
- Adaptations to electrified vehicles and mobility solutions
- What are the key drivers behind the evolution of new mobility?
- The status of connected vehicles usage
Frank Svenhard, Director Nordic Consulting, Arval
09:45 Fireside Chat: The Most Meaningful Progress Happens Together – Collaboration as Strategy in SDV
- Why Coretura exists: two competitors decided the future of commercial vehicles is too big to build alone – and what that means for how partnerships work in this industry
- From procurement to co-creation: building strategic relationships with startups and established players that go beyond transactional supply chain thinking
- The human side of SDV: why leadership, trust, and ways of working matter as much as the technology when you’re building something genuinely new
- Creating an organization where people grow, share openly, and debate freely – because that’s what it takes to move at the speed the industry needs
Maria Kangevall, Chief Partnership Officer, Coretura
10:15 From Driver Assistance to Driverless: Engineering the Software Backbone of Autonomous Mobility
- Why autonomy is inevitable: Market, safety, and efficiency drivers are pushing transportation toward increasingly autonomous vehicles, supported by advances in AI, sensors, and high-performance computing
- Autonomy levels drive exponential complexity: Each step from driver assistance to full autonomy adds more sensors, algorithms, software, and system interactions – turning vehicles into large-scale cyber-physical systems
- Software becomes the dominant engineering challenge: Autonomous driving requires millions of lines of safety-critical code, AI models, continuous updates, and massive simulation and test coverage
- Traditional development approaches no longer scale: Fragmented tools and siloed processes cannot manage the growing number of requirements, configurations, test cases, and safety artifacts
- An integrated ALM toolchain as the backbone: End-to-end traceability across requirements, architecture, software, testing, and validation is essential to master complexity and deliver safe autonomous systems
Michele Del Mondo, Senior Director, Global Advisor Automotive, PTC
10:40 Networking break and exhibition visit
Panel Discussion
11:20 Vehicle Software Deployment: A Strategic Investment for Competitive Advantage
- How to deploy AD from a fleet perspective?
- What is the status of Transformation for Autonomous in Sweden and the Nordic region?
Moderator:
Malin Broqvist Andersson, Program Director, Drive Sweden
Panelists:
Vivetha Joshna Natterjee, Head of Product & Deployment, Autonomous Driving, Bolt
Morten Schjødt-Osmo, Strategy and Business Developer, VY, Norway
Thomas Axelsson, Autonomous Vehicles and Mobility, Lindholmen Science Park
12:00 How a Traditional Operator Works with Autonomy: Lessons from VY
- Our experiences from projects in Norway and Sweden
- How the company is working to find its place in the future value chain for self-driving
Morten Schjødt-Osmo, Strategy and Business Developer, VY, Norway
12:40 Networking lunch break and exhibition visit
13:50 Vehicle Software Deployment: A Strategic Investment for Competitive Advantage
- VSWD as Business Enable and Value Creator, not just a Software Update Tool
- Business Impact and Risks of Deployment failures
- Observability and Metrics for decision making and support
- Volvo Group’s Productization Approach for VSWD
Henrik Klevljung, Expert Platform Architect, Volvo Group
14:30 Open-Source Based Platform to Demonstrate a New Way of Designing and Producing Cars
Jonas Nyvang, CEO & Co-founder, Stilfold
15:00 Networking break and exhibition visit
15:30 When Policy Meets Reality: Navigating the Regulatory Storm Towards Fossil-Free Freight Transport
- Europe’s climate ambition is colliding with its industrial competitiveness agenda — creating a policy storm that defines the pace of the fossil-free freight transition
- Regulatory volatility and “policy limbo” erode investment confidence in vehicles, fuels and infrastructure
- Fragmented industry structures – dominated by small hauliers – amplify the effects of rapid and complex regulatory change
- Path forward: Why the industry needs both visibility and foresight in forging a more proactive cybersecurity posture
Kristina Andersson, Senior Researcher/Legal Expert, RISE Research Institutes of Sweden
16:10 From peripheral player to ecosystem catalyst: How firms can lead without owning the platform
- As automotive firms enter mature digital platforms, they often begin as peripheral actors with limited influence
- This session draws on a multi-year case study of Polestar’s collaboration with Google
- The case illustrates how a resource‑constrained automaker can evolve into a focal complementor, acting as a catalyst for creating a dedicated sub‑ecosystem within an established ecosystem
- The focal complementor achieves this by:
- Mobilizing partners
- Shaping innovation
- Accelerating value creation without owning the platform
- Through a brief research-driven introduction followed by a live interview, the session provides concrete insights for OEMs navigating software-defined vehicles and connected services
Anya Ernest, People Manager, Polestar Connected Services
Maya Hoveskog, Associate Professor Innovation Management, School of Business, Innovation and Sustainability, Halmstad University
Ellinor Südow, Project Manager, Halmstad University Solar Team
Magnus Holmén, Professor Innovation Sciences, School of Business, Innovation and Sustainability, Halmstad University
16:40 Moderator’s closing remarks and close of conference